Satya Mallick, LearnOpenCV.com
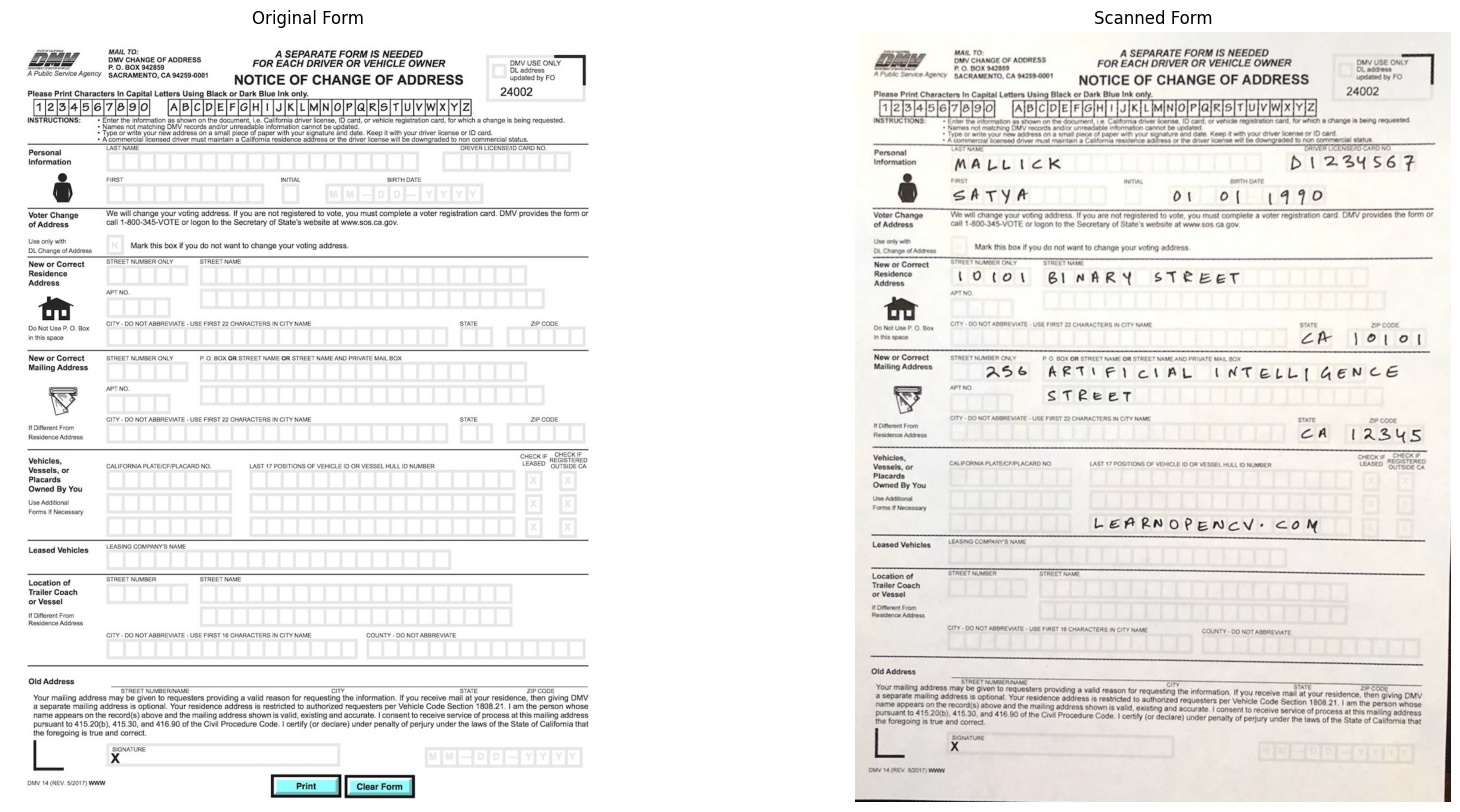
Align an image to a template.¶
Theory¶
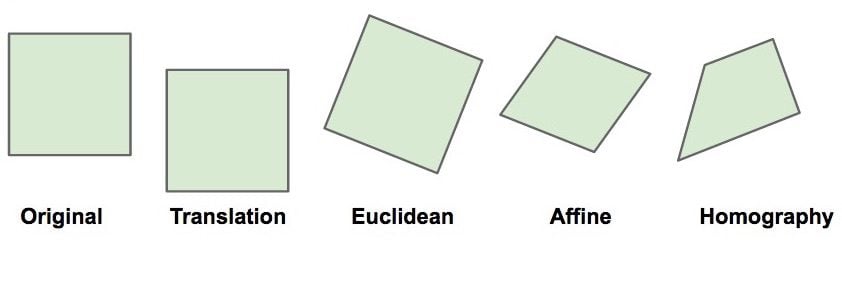
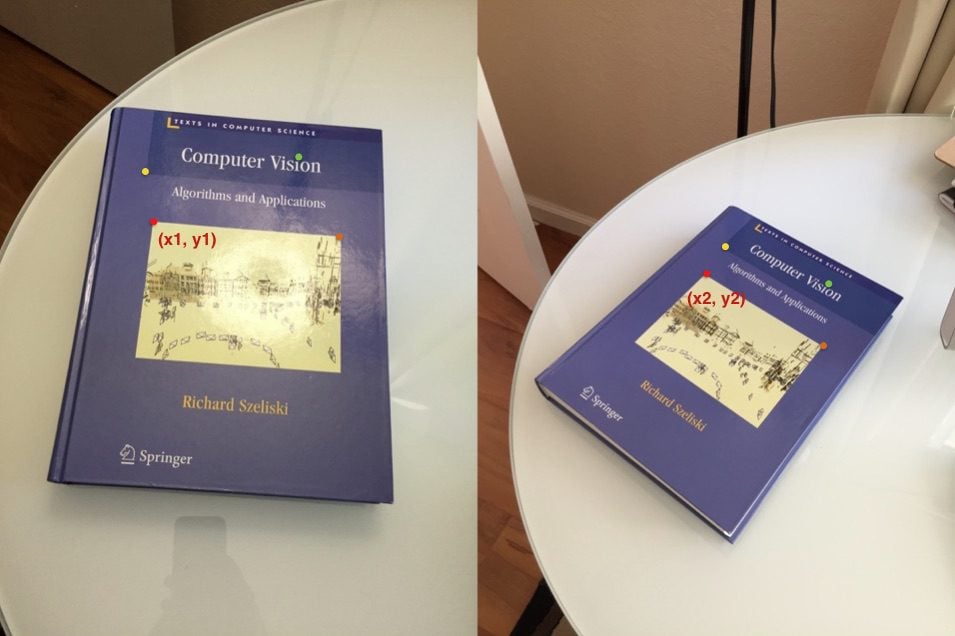
Images of two planes are related by a Homography
We need 4 corresponding points to estimate Homography
# Imports
import os
import cv2
import numpy as np
import matplotlib.pyplot as plt
from zipfile import ZipFile
from urllib.request import urlretrieve
%matplotlib inlineDownload Assets¶
def download_and_unzip(url, save_path):
print(f"Downloading and extracting assests....", end="")
# Downloading zip file using urllib package.
urlretrieve(url, save_path)
try:
# Extracting zip file using the zipfile package.
with ZipFile(save_path) as z:
# Extract ZIP file contents in the same directory.
z.extractall(os.path.split(save_path)[0])
print("Done")
except Exception as e:
print("\nInvalid file.", e)URL = r"https://www.dropbox.com/s/zuwnn6rqe0f4zgh/opencv_bootcamp_assets_NB8.zip?dl=1"
asset_zip_path = os.path.join(os.getcwd(), "opencv_bootcamp_assets_NB8.zip")
# Download if assest ZIP does not exists.
if not os.path.exists(asset_zip_path):
download_and_unzip(URL, asset_zip_path)Step 1: Read Template and Scanned Image¶
# Read reference image
refFilename = "form.jpg"
print("Reading reference image:", refFilename)
im1 = cv2.imread(refFilename, cv2.IMREAD_COLOR)
im1 = cv2.cvtColor(im1, cv2.COLOR_BGR2RGB)
# Read image to be aligned
imFilename = "scanned-form.jpg"
print("Reading image to align:", imFilename)
im2 = cv2.imread(imFilename, cv2.IMREAD_COLOR)
im2 = cv2.cvtColor(im2, cv2.COLOR_BGR2RGB)Reading reference image: form.jpg
Reading image to align: scanned-form.jpg
# Display Images
plt.figure(figsize=[20, 10]);
plt.subplot(121); plt.axis('off'); plt.imshow(im1); plt.title("Original Form")
plt.subplot(122); plt.axis('off'); plt.imshow(im2); plt.title("Scanned Form")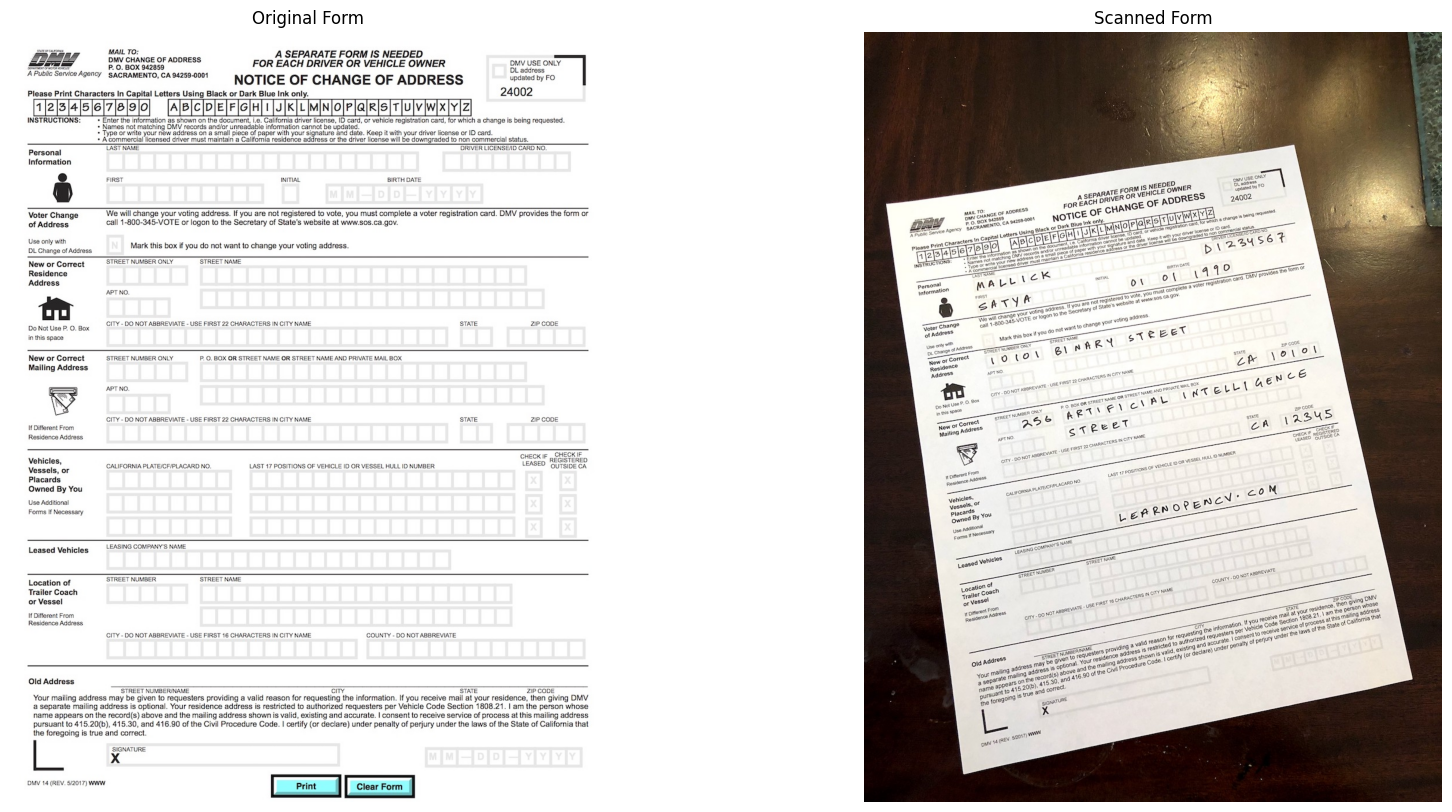
Step 2: Find keypoints in both Images¶
Think of keypoints as corner points that are stable under image transformations
# Convert images to grayscale
im1_gray = cv2.cvtColor(im1, cv2.COLOR_BGR2GRAY)
im2_gray = cv2.cvtColor(im2, cv2.COLOR_BGR2GRAY)
# Detect ORB features and compute descriptors.
MAX_NUM_FEATURES = 500
orb = cv2.ORB_create(MAX_NUM_FEATURES)
keypoints1, descriptors1 = orb.detectAndCompute(im1_gray, None)
keypoints2, descriptors2 = orb.detectAndCompute(im2_gray, None)
# Display
im1_display = cv2.drawKeypoints(im1, keypoints1, outImage=np.array([]),
color=(255, 0, 0), flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
im2_display = cv2.drawKeypoints(im2, keypoints2, outImage=np.array([]),
color=(255, 0, 0), flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)plt.figure(figsize=[20,10])
plt.subplot(121); plt.axis('off'); plt.imshow(im1_display); plt.title("Original Form");
plt.subplot(122); plt.axis('off'); plt.imshow(im2_display); plt.title("Scanned Form");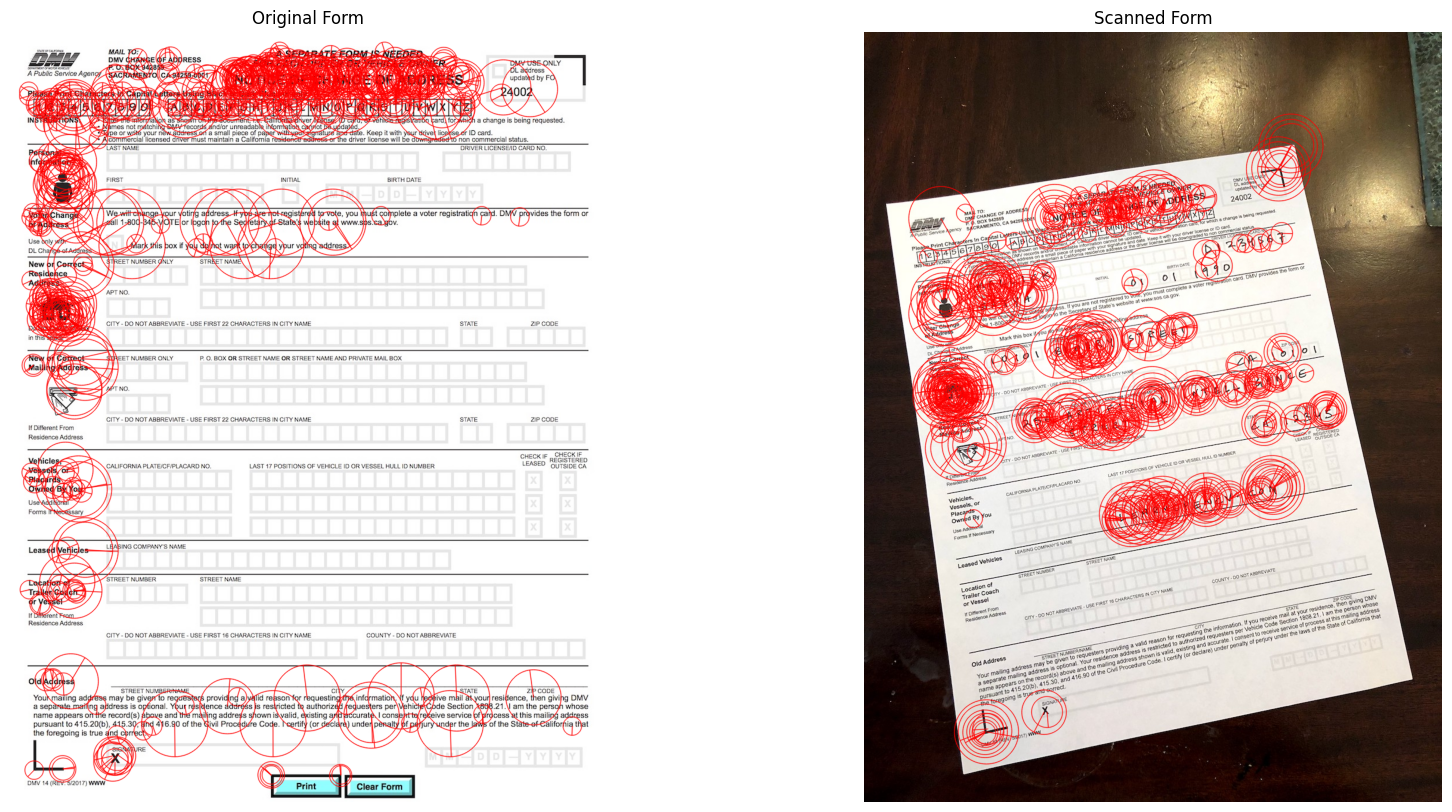
Step 3 : Match keypoints in the two image¶
# Match features.
matcher = cv2.DescriptorMatcher_create(cv2.DESCRIPTOR_MATCHER_BRUTEFORCE_HAMMING)
# Converting to list for sorting as tuples are immutable objects.
matches = list(matcher.match(descriptors1, descriptors2, None))
# Sort matches by score
matches.sort(key=lambda x: x.distance, reverse=False)
# Remove not so good matches
numGoodMatches = int(len(matches) * 0.1)
matches = matches[:numGoodMatches]# Draw top matches
im_matches = cv2.drawMatches(im1, keypoints1, im2, keypoints2, matches, None)
plt.figure(figsize=[40, 10])
plt.imshow(im_matches);plt.axis("off");plt.title("Original Form")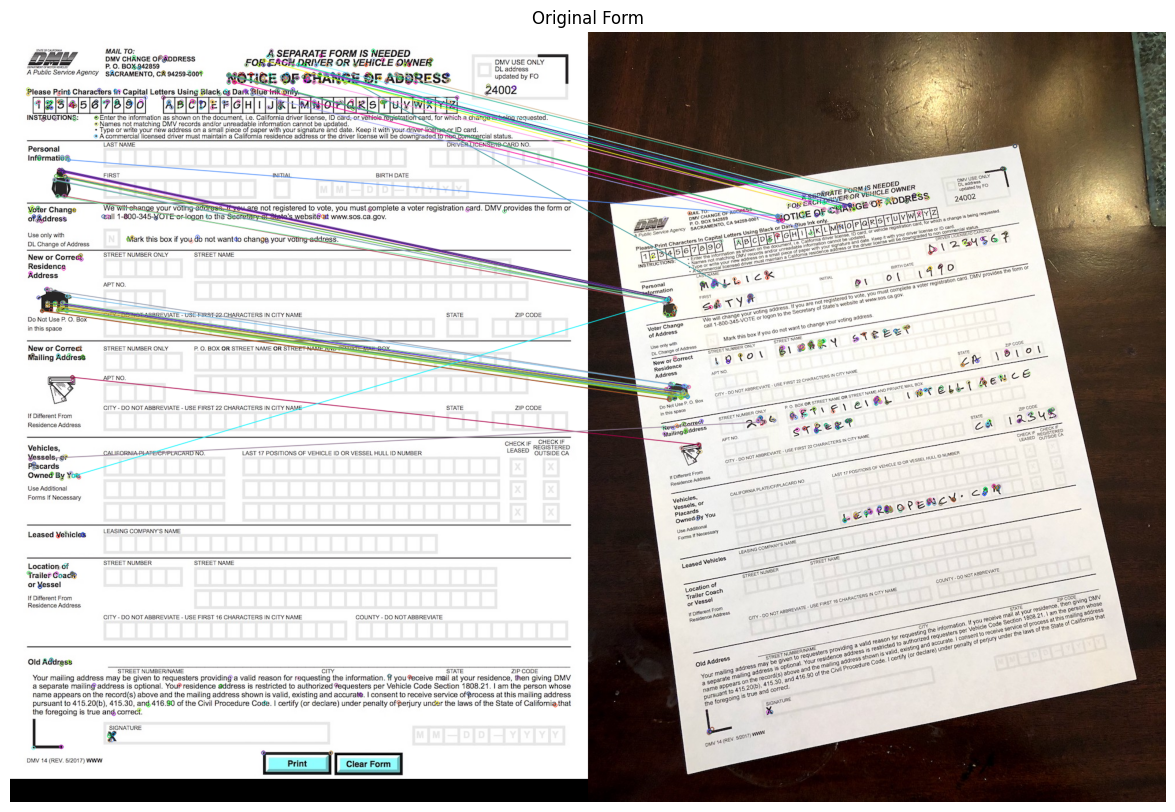
Step 4: Find Homography¶
# Extract location of good matches
points1 = np.zeros((len(matches), 2), dtype=np.float32)
points2 = np.zeros((len(matches), 2), dtype=np.float32)
for i, match in enumerate(matches):
points1[i, :] = keypoints1[match.queryIdx].pt
points2[i, :] = keypoints2[match.trainIdx].pt
# Find homography
h, mask = cv2.findHomography(points2, points1, cv2.RANSAC)Step 5: Warp image¶
# Use homography to warp image
height, width, channels = im1.shape
im2_reg = cv2.warpPerspective(im2, h, (width, height))
# Display results
plt.figure(figsize=[20, 10])
plt.subplot(121);plt.imshow(im1); plt.axis("off");plt.title("Original Form")
plt.subplot(122);plt.imshow(im2_reg);plt.axis("off");plt.title("Scanned Form")